Digger Finger, MIT’s New Robot with a Promising Range of Applications

There are so many exciting developments in the field of robotics that promises to find more applications later in different industries. Lately, many researchers and roboticists are creating robots that can interact better with humans and objects in various ways.
Many believe that robots are very strong and powerful, and that is not far from the truth. But they can be programmed to be gentle enough to pick up and hold fragile objects, coil around things with odd shapes to get a better grip and touch people gently.
New robot with multiple applications
MIT scientists announced in late May 2021 their newly designed robot, which can dig into granular materials like soil, sand, or packed earth. The robot can sense items buried in granular materials.
In creating the robot, the roboticists designed a small device shaped like a finger, which they attached to a robotic arm. By vibrating or twisting gently, the robot clears obstructions as it digs in the identified area while avoiding other hindrances.
The scientists can change the settings of the robot finger to conform to the shape and size of the grains it will try to dig through, and they found out that the robot can already make its way through to sense the buried object’s shape.
The MIT scientists call their new robot Digger Finger, and they will present their paper and the robot at the International Symposium on Experimental Robotics on Nov. 15-18, 2021 in Malta.
Digger Finger
Radhen Patel, lead author of the study explains that their concept is to have a robot finger that will have a heightened sense of touch and can distinguish various things through touch. He added that such a robot will be of great help when looking for and disabling bombs and land mines buried in the ground.
The designers of Digger Finger think that their new design will be a more accurate substrate sensor. According to the roboticists, the more common method when searching underground is to use ultrasonic vibrations or Ground Penetrating Radar. These technologies have a longer sensory range, but they can also miss differentiating various types of materials, for example, bones or rocks.
Making the fields of robotics and artificial touch better
The technology of Digger Finger helps in the development of robot hands that can hold and sense fragile items. The MIT team behind the creation of Digger Finger sees robotic hands becoming more dexterous as human hands and handling delicate tasks that require specialization, such as surgery. They see their creation later adapted to searching buried cables and bombs in dangerous areas, and other application where the sense of touch is critical.
Creating Digger Finger
In the course of developing a robot with a tactile sensor to find buried objects, the MIT team decided they need a slender finger that can penetrate sand and mobile enough to squirm free when encountering sand grain jams. They wanted something with the right sensitivity to feel the detailed shape of a buried item.
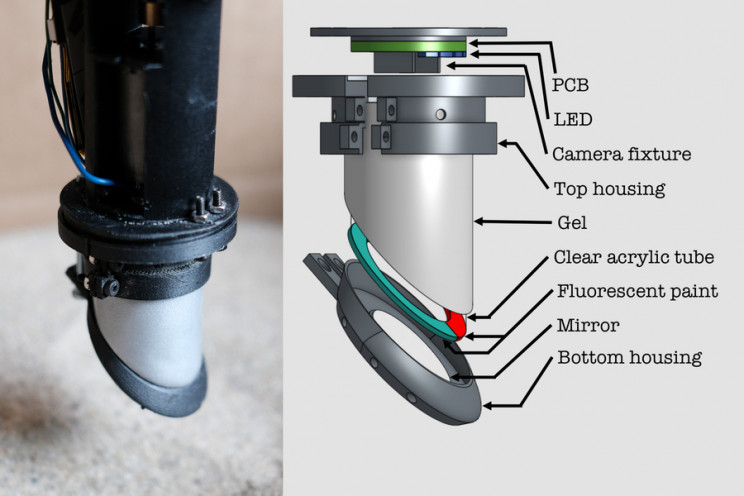
They designed a finger with a sharp tip equipped with a tactile sensor. They were aiming for a robot that will be able to correctly identify the shape of the object. For the digger, they used their past work, GelSight, which is a tactile sensor with a reflective membrane that takes the shape of the object that is pressing against it. The creation’s sense of artificial touch was excellent but the design was bulky.
For the new robot, they slimmed down the design, creating a bevel-tipped small cylinder, and reduced the number of LED lights. The final design has a 2-centimeter square tactile sensing membrane.
For the tests, they mounted the finger onto a robot arm so it can dig through coarse-grained rice and fine-grained sand. To pass through packed particles, they added vibration to the finger’s features. They tested its capability to wriggle through different media and while trapped grains can obscure the object’s shape, Digger Finger was able to sense the object’s general contour.
The research funding for Digger Finger was partly provided by the Office of Naval Research, the Norwegian Research Council, and the Toyota Research Institute through the Toyota-CSAIL Joint Research Center.
Digger Finger seems to hold plenty of promise as artificial touch can extend its application into healthcare, including feeling tumors during surgical procedures. The researchers want to apply the technology to highly complex environments where isolating distracting information is required.